











Consulta de Produto
Seu endereço de e-mail não será publicado. Os campos obrigatórios estão marcados *


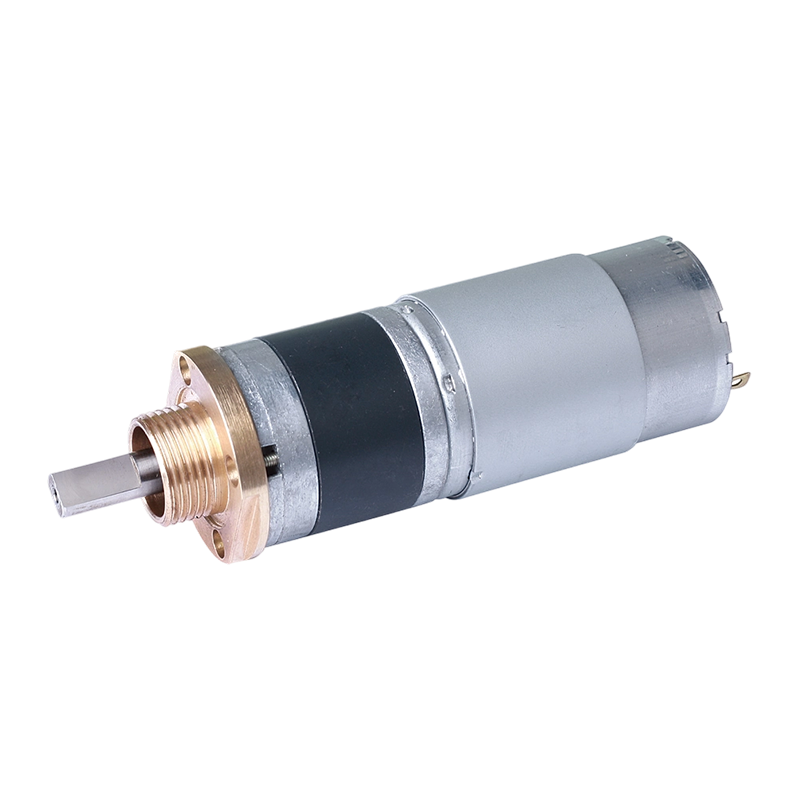
Um motorredutor DC é um motor elétrico de corrente contínua emparelhado com uma caixa de engrenagens mecânica em uma única unidade integrada. O próprio motor gira rápido – geralmente de 3.000 a 15.000 RPM na tensão nominal – mas a maioria das aplicações do mundo real precisa de movimento lento e controlado com força de giro substancial. A caixa de câmbio resolve isso trocando velocidade por torque por meio de uma série de engrenagens engrenadas. O resultado é um eixo de saída que gira muito mais lentamente que o rotor do motor, mas com torque proporcionalmente maior disponível no eixo.
Sem a caixa de engrenagens, um pequeno motor CC pode girar facilmente uma pá de ventilador, mas tem dificuldade para levantar uma carga, acionar uma correia transportadora ou girar uma válvula. Com uma redução de engrenagem de, digamos, 100:1, o mesmo motor que produz 5 mN·m de torque de funcionamento livre agora fornece aproximadamente 500 mN·m na saída – menos perdas por atrito da engrenagem, normalmente 5–20% dependendo do tipo de engrenagem e da lubrificação. Essa multiplicação de torque, combinada com a integração compacta do motor e da caixa de engrenagens em um único conjunto, é o motivo pelo qual os motoredutores CC estão entre os componentes de movimento mais amplamente especificados em aplicações industriais, comerciais e de consumo.
O projeto da caixa de câmbio tem um impacto maior no desempenho, tamanho, eficiência e ruído do que quase qualquer outra variável de projeto. Quatro configurações dominam o mercado.
As engrenagens retas possuem dentes retos cortados paralelamente ao eixo do eixo. Eles são o tipo de engrenagem mais simples e menos dispendioso de fabricar, o que torna os motores CC com engrenagens retas a escolha padrão para aplicações sensíveis ao custo. Seu principal ponto fraco é o ruído: como toda a largura do dente engata simultaneamente em cada contato da malha, as engrenagens de dentes retos produzem um ruído característico em alta velocidade. A eficiência é boa – normalmente 95–98% por estágio – e eles suportam bem cargas radiais moderadas. Motores de engrenagem reta são comuns em impressoras, brinquedos, máquinas de venda automática e atuadores leves, onde a operação silenciosa não é uma prioridade.
Uma caixa de engrenagens planetárias organiza múltiplas engrenagens "planetárias" em torno de uma engrenagem "solar" central, todas contidas em uma coroa dentada. Como a carga é compartilhada por várias engrenagens planetárias simultaneamente, um motorredutor CC planetário oferece densidade de torque muito alta em um pacote coaxial compacto. O eixo de saída está alinhado com o eixo do motor, o que simplifica a instalação em layouts com espaço limitado. As caixas de engrenagens planetárias são mais rígidas e precisas do que os tipos de dentes retos ou sem-fim, tornando-as a escolha preferida para robótica, veículos guiados automaticamente (AGVs), parafusadeiras elétricas e qualquer aplicação que exija alto torque, precisão posicional rigorosa e longa vida útil. A desvantagem é o custo: as caixas de engrenagens planetárias são significativamente mais caras de produzir do que os tipos de dentes retos ou helicoidais com a mesma classificação de torque.
Uma caixa de engrenagens sem-fim usa um eixo sem-fim em forma de parafuso que engrena com uma roda sem-fim em um ângulo de 90 graus. Esta configuração atinge taxas de redução muito altas em um único estágio — geralmente 5:1 a 100:1 — e fornece uma característica natural de autotravamento: quando o motor para, a carga não pode retroceder a caixa de engrenagens. Isso torna os motores CC de engrenagem helicoidal ideais para aplicações onde a carga deve manter a posição sem energia, como abridores de portas de garagem, elevadores de palco, atuadores de camas hospitalares e barreiras de segurança. A principal limitação é a eficiência: o atrito da malha da engrenagem helicoidal é alto, com eficiência típica de estágio único variando de 50 a 90% dependendo do ângulo de ataque, com relações mais altas sendo progressivamente menos eficientes. Os motores de engrenagem helicoidal também produzem calor significativo sob ciclos contínuos de trabalho de alta carga.
As engrenagens helicoidais têm dentes cortados em ângulo com o eixo do eixo, de modo que o contato entre os dentes é gradual e progressivo, em vez de abrupto. Isto reduz drasticamente o ruído e a vibração em comparação com as engrenagens de dentes retos e melhora ligeiramente a capacidade de carga devido à maior área de contato efetiva. Os motoredutores helicoidais CC são comuns em aplicações que exigem operação mais silenciosa – acionamentos de transportadores, máquinas de embalagem e equipamentos médicos. As combinações de bisel helicoidal permitem que o eixo de saída seja deslocado em 90 graus em relação ao motor, semelhante a um acionamento sem-fim, mas com maior eficiência (normalmente 94–97% por estágio). O aumento do empuxo axial gerado pela engrenagem helicoidal requer rolamentos que possam suportar essa carga, o que aumenta ligeiramente o custo unitário.
O próprio elemento do motor DC vem em duas arquiteturas fundamentais, e a escolha entre elas afeta significativamente o custo, os requisitos de manutenção, a faixa de velocidade e a vida útil.
| Recurso | Motor de engrenagem DC escovado | Motor de engrenagem DC sem escova (BLDC) |
| Método de comutação | Mecânico (comutador de escovas de carvão) | Eletrônico (ESC ou driver de motor) |
| Vida útil típica | 500–3.000 horas (desgaste da escova limitado) | 10.000–20.000 horas |
| Complexidade de controle | Simples – tensão ou PWM direto | Requer driver BLDC/ESC dedicado |
| Eficiência | 75–85% típico | 85–95% típico |
| Ruído e EMI | Maior (o arco da escova gera EMI) | Inferior |
| Custo Unitário | Inferior | Superior (motorista) |
| Aplicações Típicas | Brinquedos, eletrodomésticos, automação de luz | Robótica, AGVs, dispositivos médicos, EVs |
Para prototipagem ou aplicações intermitentes de baixo serviço, um motorredutor CC escovado acionado por uma ponte H simples L298N ou TB6612FNG é o caminho mais rápido e barato para um sistema funcional. Para qualquer coisa que funcione continuamente, opere em um ambiente hostil ou que deva durar anos em campo sem manutenção, um motorredutor CC sem escovas – apesar de seu custo inicial mais alto e da eletrônica de acionamento adicional – quase sempre oferece melhor custo total de propriedade.
As planilhas de dados do motor redutor CC podem ser densas, mas cinco parâmetros determinam se um motor funcionará em sua aplicação. Compreender cada um evita os erros de seleção mais comuns.
Motoredutores CC são projetados para uma tensão de alimentação específica – mais comumente 6V, 12V, 24V ou 48V em aplicações industriais e de hobby. Operar um motor significativamente acima de sua tensão nominal acelera o desgaste das escovas, superaquece os enrolamentos e reduz a vida útil dos rolamentos. Operar abaixo da tensão nominal reduz o torque disponível e pode fazer com que o motor pare sob carga. Para sistemas alimentados por bateria, combine a tensão nominal do motor com a tensão nominal da bateria no meio da carga, e não na carga total, para evitar sobretensão no topo do ciclo de carga. Um motoredutor de 12 Vcc alimentado por um LiPo 3S recém-carregado (12,6 V) é marginalmente aceitável; executá-lo a partir de um pacote 4S (16,8 V) irá destruí-lo rapidamente.
A velocidade sem carga é a RPM do eixo de saída quando o motor está funcionando em tensão nominal com torque aplicado zero. Sob carga real, a velocidade cai — normalmente de 10 a 20% no torque nominal (contínuo) e de até 50% no pico de torque de perda. Ao calcular se um motoredutor CC pode mover uma carga na velocidade necessária, sempre use a velocidade carregada no ponto operacional de torque esperado, e não o valor sem carga. Às vezes, os fabricantes listam apenas a velocidade sem carga e o torque de parada; o ponto operacional carregado fica aproximadamente no meio da curva velocidade-torque.
O torque nominal (também chamado de torque contínuo) é o torque máximo que o motor pode fornecer indefinidamente sem superaquecimento. O torque de parada é o pico de torque produzido quando o eixo é mantido estacionário - normalmente 5 a 10 vezes o torque nominal de um motoredutor CC com escovas. O torque de bloqueio é útil para dimensionar picos de carga intermitentes (a força necessária para liberar uma válvula presa, por exemplo), mas operar continuamente no bloqueio ou perto dele superaquecerá o motor rapidamente. Selecione um motor cujo torque nominal seja pelo menos 20–30% acima do torque de carga contínua esperado para sua aplicação. Esta margem de segurança leva em conta a variação de atrito, queda de tensão e redução de temperatura.
A relação de transmissão expressa quantas revoluções do eixo do motor produzem uma revolução do eixo de saída. Uma relação de 50:1 significa que a saída gira uma vez a cada 50 voltas do motor. Relações de transmissão mais altas produzem menor velocidade de saída e maior torque de saída. No entanto, relações muito altas introduzem mais estágios de engrenagem, o que aumenta as perdas por atrito e a folga – a pequena quantidade de folga no eixo de saída quando a direção inverte. Para aplicações de posicionamento, a folga é uma especificação crítica: as caixas de engrenagens planetárias normalmente oferecem 0,5 a 3 minutos de arco de folga em classes de precisão, enquanto as caixas de engrenagens de dentes retos econômicas podem ter de 1 a 5 graus de folga, o que é inaceitável para qualquer coisa que exija posicionamento repetível.
O ciclo de trabalho descreve a porcentagem de tempo que um motor opera versus descanso dentro de um determinado período de ciclo. Um motor classificado para S1 (serviço contínuo) pode funcionar indefinidamente com carga nominal sem superaquecimento. As classificações S2 (trabalho de curta duração) e S3 (trabalho periódico intermitente) permitem níveis de potência de pico mais elevados porque o motor esfria durante os períodos desligados. Sempre combine a classificação de serviço do motor com seu ciclo operacional real - um motor classificado para ciclo de trabalho de 30% irá superaquecer e falhar se funcionar continuamente, mesmo se o torque e a velocidade estiverem dentro dos limites da placa de identificação.
A seleção de tensão geralmente é orientada pela fonte de energia disponível e não pela preferência do motor, mas compreender os casos de uso típicos para cada nível de tensão ajuda a restringir suas opções rapidamente.
Fazer a seleção correta do motor na primeira vez evita reprojetos dispendiosos e falhas em campo. Siga esta estrutura prática:
Calcule o torque que sua aplicação requer no eixo de saída. Para um robô com rodas, isso significa calcular a força necessária para acelerar a massa do robô, superar o atrito de rolamento e subir quaisquer inclinações esperadas na operação. Para um atuador linear, calcule a força no parafuso de avanço e converta-a em torque do motor por meio do avanço e da eficiência do parafuso. Adicione uma margem de segurança de 25 a 50% para levar em conta a variação de atrito, o envelhecimento e os piores cenários de carregamento. Este número de torque alvo — com a margem aplicada — torna-se sua especificação de torque nominal mínimo.
Estabeleça a velocidade mínima e máxima do eixo de saída que sua aplicação precisa. Um transportador que movimenta o produto a 0,5 m/s com um rolo de acionamento de 50 mm de diâmetro requer uma velocidade de saída de aproximadamente 191 RPM (0,5 / (π × 0,05) × 60). Selecione um motor cuja velocidade sem carga seja pelo menos 15–20% acima da velocidade com carga necessária para garantir que o motor não esteja operando perto de parada em condições normais.
Use o seguinte guia de decisão para combinar o tipo de caixa de engrenagens com os requisitos da aplicação:
Verifique se sua fonte de alimentação pode fornecer a demanda de corrente de pico do motor em parada. A corrente de parada para um motorredutor CC com escovas é normalmente 5 a 10 vezes a corrente sem carga. Se a sua fonte não puder fornecer esta corrente transitoriamente durante condições de inicialização ou congestionamento, adicione um driver de motor limitador de corrente com limite de corrente ajustável ou selecione um driver de motor com altura livre adequada. Para motoredutores CC sem escovas, confirme se as classificações de corrente contínua e de pico do driver BLDC excedem os requisitos do motor com pelo menos 20% de margem.
Os motoredutores CC padrão não são vedados. Se o motor for exposto a poeira, umidade, respingos de líquido refrigerante ou condições de lavagem, especifique uma unidade com classificação IP — IP54 para proteção contra poeira e respingos, IP65 ou IP67 para ambientes mais exigentes. Para aplicações de processamento de alimentos, farmacêuticas ou marítimas, confirme se o lubrificante da caixa de engrenagens atende aos requisitos regulamentares aplicáveis (graxa de grau alimentício NSF H1 para zonas de contato com alimentos, por exemplo). A faixa de temperatura operacional também é importante: os motores padrão são classificados para ambientes de 0–40°C; para armazéns frigoríficos ou instalações externas em climas do Norte, confirme as especificações da graxa para baixa temperatura e as classificações de temperatura do enrolamento.
Os motoredutores CC aparecem em uma enorme gama de produtos e sistemas. Compreender onde eles são comumente usados ajuda a identificar projetos de referência apropriados e configurações validadas.
| Indústria | Aplicação | Tipo típico de motor de engrenagem |
| Robótica e AGVs | Rodas motrizes, atuação conjunta, mecanismos de garra | Planetário sem escova, 24V–48V |
| Automação Industrial | Transportadores, mesas de indexação, atuadores de válvula | Helicoidal, sem-fim ou planetário, 24V |
| Dispositivos Médicos | Bombas de infusão, instrumentos cirúrgicos, camas hospitalares | Planetário sem escova, folga baixa, 12V–24V |
| Automotivo | Vidros elétricos, ajustadores de assento, acionamentos de teto solar | Sem-fim ou espora escovada, 12V |
| Eletrônicos de consumo | Pan/tilt da câmera, atuadores domésticos inteligentes, impressoras | Esporão escovado, 5V–12V |
| Agricultura | Controle de válvula de irrigação, mecanismos de semeadura | Worm ou planetário com classificação IP, 12V–24V |
| Automação Predial | Amortecedores HVAC, atuadores cegos, acionamentos de portas | Helicoidal ou sem-fim sem escova, 24V |
Os motoredutores CC são adequados para operação com velocidade variável porque a velocidade do motor CC é diretamente proporcional à tensão aplicada. Na prática, a velocidade é controlada por um dos três métodos.
PWM é o método padrão para controlar motoredutores CC com escovas a partir de microcontroladores, PLCs e ICs de driver de motor. O driver liga e desliga a alimentação do motor em uma frequência fixa – normalmente 1–20 kHz – e o ciclo de trabalho (a porcentagem de tempo em que a alimentação está ligada) determina a tensão média e, portanto, a velocidade. Um ciclo de trabalho de 50% a 12 V fornece aproximadamente 6 V equivalente ao motor. O controle PWM é eficiente porque os transistores chaveadores passam a maior parte do tempo totalmente ligados ou desligados, minimizando as perdas resistivas. Frequências PWM abaixo de 1 kHz podem causar ruído audível do motor à medida que os enrolamentos da armadura vibram na frequência de comutação; frequências acima de 20 kHz colocam isso acima da faixa audível. Para motoredutores CC com escovas, uma frequência PWM de 10–20 kHz é uma escolha prática comum.
Para aplicações que exigem velocidade precisa e consistente, independentemente da variação de carga – plataformas robóticas, unidades de fita, distribuição de precisão – um codificador rotativo montado no eixo do motor ou na saída da caixa de engrenagens fornece feedback de velocidade em tempo real para um controlador PID. O controlador compara a velocidade real com o ponto de ajuste e ajusta o ciclo de trabalho PWM para compensar. Os codificadores para motoredutores CC são tipicamente do tipo quadratura óptica ou magnética de efeito Hall, com resoluções de 6 a vários milhares de contagens por revolução, dependendo dos requisitos de precisão. Muitos fornecedores de motoredutores CC oferecem opções de encoders integrados como itens de catálogo padrão, simplificando significativamente a integração de hardware.
Em sistemas simples onde a carga é relativamente constante e a precisão da velocidade não é crítica, a velocidade pode ser definida ajustando a tensão de alimentação com uma fonte de alimentação CC variável ou um regulador de tensão linear. Esta abordagem é a menos eficiente – um regulador linear dissipa a queda de tensão na forma de calor – e não oferece compensação de carga, mas é a implementação mais simples e é apropriada para bancadas de teste, ajustes manuais de velocidade e aplicações de potência muito baixa onde a dissipação térmica no regulador não é uma preocupação.
Compreender o que eventualmente causa a falha de um motorredutor CC ajuda a projetar sistemas que estendem os intervalos de manutenção e detectam problemas antes que eles causem paradas não planejadas.
Seu endereço de e-mail não será publicado. Os campos obrigatórios estão marcados *
Direitos autorais © Zhejiang Dongzheng Motor Co., Ltd. Todos os direitos reservados.
 Fabricantes de motores de engrenagem DC
Fabricantes de motores de engrenagem DC